Ensemble Kalman Filter
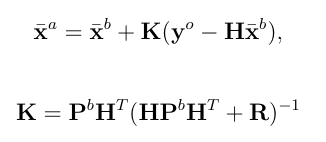
Ensemble mean is updated via Kalman Filter equations.
H is operator that takes model state vector and converts it to predicted observations.