Ensemble
Kalman filter
ßReplace xk, Pk from the full KF
with an ensemble
of xk,i, i=1,…,Nens
ßAdd
dynamic noise consistent with Qk to xk,i when propagating;
add measurement noise
consistent with Rk to measurements when updating, initial
ensemble has a spread
consistent with P0
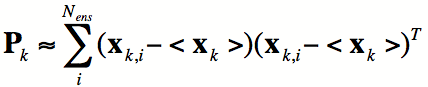
ßWhen
needed in KF equations, Pk replaced with
ßReplace
matrix multiplications with sums of dot products
ßGood for
non-Gaussian distributions