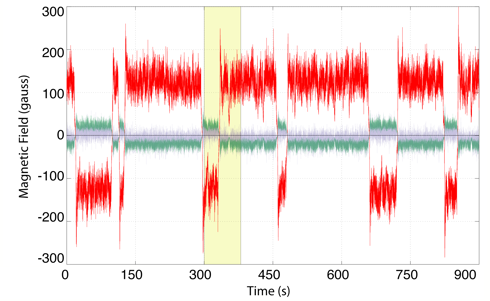
reversals
•
T
dyn
≈
100 s
•
T
rev
≈
5 s
•
synchronous :
B
= 0
∂
t
B
= rot(
u
x
B
) +
l
∆
B
sym
B
/
-
B